汽车理论
@ wily
常见名词
1
2
| 1. ECU 电子控制单元,在八字里面是模拟的,发布相关消息;
2. ESC 汽车电子稳定控制系统,是汽车ABS(防抱死系统)和TCS(牵引力控制系统)的进一步扩展
|
操纵性指标
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
| 1. 时域响应特性,汽车在转向盘输入或者外界干扰输入下的侧向运动相应随时间变化的特性
$ 转向盘角阶跃输入
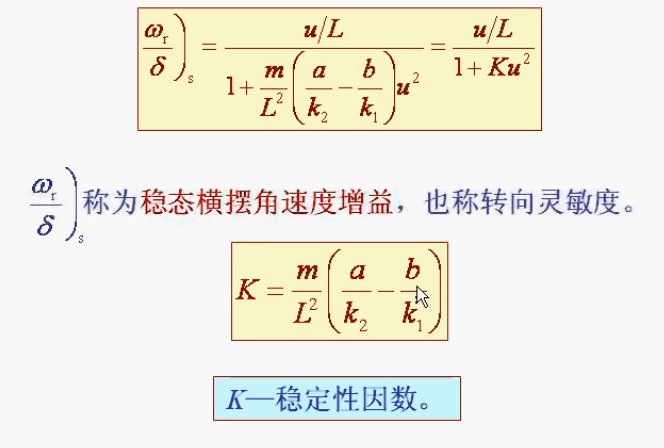
稳态响应---->横摆角速度增益(转向灵敏度)
瞬态响应---->反应时间;横摆角速度波动的无阻尼圆频率
$ 横摆角速度频率响应特性
汽车横摆角速度与转向盘转角的振幅比及相位差的变换规律--->
共振峰频率;共振时振幅比;相位滞后角;稳态增益
$ 转向盘中间位置操纵稳定性
转向盘小转角,低频正弦输入--->转向灵敏度;转向盘力特性;转向功灵敏度
$ 回正性
转向盘力输入下的时域响应--->回正后剩余横摆角速度与剩余横摆角; 达到剩余横摆角速度的时间
$ 转向半径
最小转向半径---> 八字中为kappa_
四轮转向时,前轮若左转,后轮可以略微右转来减小转向半径
$ 转向轻便性
转向力和转向功
ESP<电子稳定程序>EPS<电动主力助力转向系统>
$ 直线敏感性
$ 典型行使工况性能
$ 极限行使能力
圆周行使极限侧向加速度--->极限侧向加速度
抗侧翻能力--->极限车速
发生侧滑时的控制能力--->回至原来路径所需要的时间
2. 角阶跃输入下的时域响应
$ 稳态:角阶跃输入经过短暂时间后,汽车进入等速圆周行驶,称为转向盘角阶跃输入下进入的稳态响应
|
1
2
| $ 图中的K称为稳定性因素
$ 瞬态:在直线行使与等速圆周行驶之间的过渡过程是一种瞬态
|
轮胎的侧偏特性
1
2
3
4
5
6
7
| 1. 侧偏现象和侧偏力
汽车在行驶过程中,由于路面的侧向倾斜、侧向风或曲线行驶时的离心力等的作用,车轮中心沿Y轴方向将作用有侧向力Fy,相对应的在地面上产生侧向反作用力FY,称做侧偏力。
当车轮有侧向弹性时,即使FY没有达到侧向附着极限,车轮行驶方向也将偏离车轮平面的方向。(类似于材力的剪切)
实验表明,在侧偏角不超过5度时,侧偏力FY与侧偏角阿尔法之间呈线性关系。在侧偏角为0时,FY-a曲线的斜率称做侧偏刚度k,(这也是一个应力应变曲线),通常希望|k|越大越好。
判断一个轮胎的|k|是否大,可以通过扁平率来判断,(H/B)*100%。
侧偏刚度判断最重要的两个因素:轮胎自身结构和垂直载荷。
|
线性二自由度汽车模型对前轮角输入的响应
1
2
3
4
5
6
| 1. 建立模型:
忽略转向系统的影响,直接以前轮转角作为输入
忽略悬架的作用:车身只作平行于地面的平面运动,绕z轴的位移,绕y轴的俯仰和绕x轴的侧倾角为0;
汽车前进速度不变
在上述假设下,汽车被简化为只有侧向和横摆横摆两个自由度的两轮汽车模型
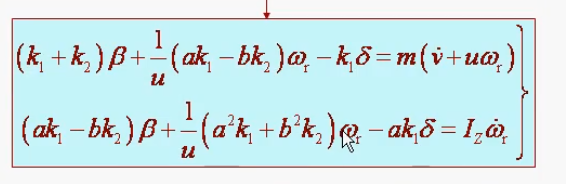
2. 经过理论上的运动学和动力学分析,可以得到微分运动方程式如下:
|
1
2
3
4
| 这个方程反映了二自由度汽车模型做曲线运动的基本关系
是这一瞬间该车的运动和动力的关系
3. 前轮角阶跃输入下汽车的稳态响应--等速圆周行驶
侧偏速度和横摆角速度均为0
|
1
2
3
4
5
6
7
8
9
10
11
12
| m是车的质量,L是轴距,a为质心到前轴的距离,b为质心到后轴的距离,k2和k1都取负数,k2是后轮的侧偏刚度,k1是前轮的侧偏刚度
这里和note_1图片对应上了
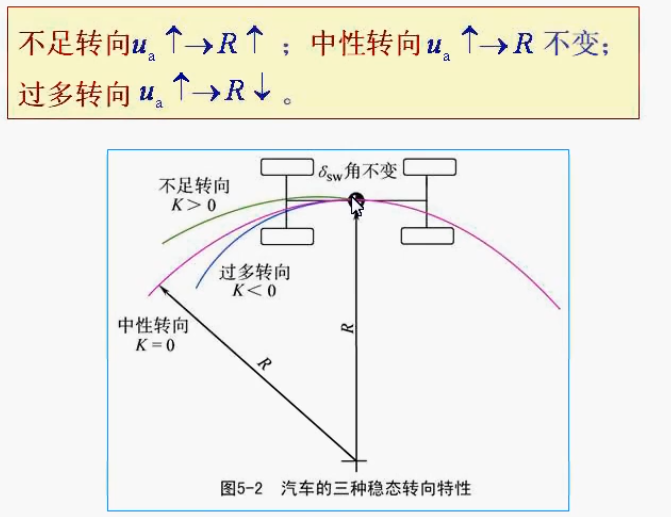
4. 稳定响应的三种类型
K=0 中性转向
K>0 不足转向
K<0 转向过度
[前驱转向不足,后驱转向过度]
由于汽车在转向过度时,容易发生侧翻,失去稳定性,因此,大多数汽车都应该具有转向不足的特性。
5.几个表征稳态响应的参数
前后轮侧偏角的绝对值之差(a1-a2),在这个公式中,侧偏角和侧向加速度等数值取的都是正值。
定性的说:前轮侧偏角,对转向有削弱作用,后轮侧偏对转向则是一种加剧。
|
汽车操纵稳定性与传动系的关系
1
2
3
| 1. 汽车在弯道上以大驱动力加速行驶时,后轮的垂直载荷增大,汽车有增加不足转向的趋势
2. 驱动力加在哪个轮上,哪个轮的侧偏角就会增加。所以说前驱转向不足,后驱转向过度!
3. 对于前后轮间气象力的分配控制,如果我们想要获得比较大的不足转向,就把驱动力向前轴分配,如果想要获得比较小的不足转向,就把驱动力向后轴分配
|
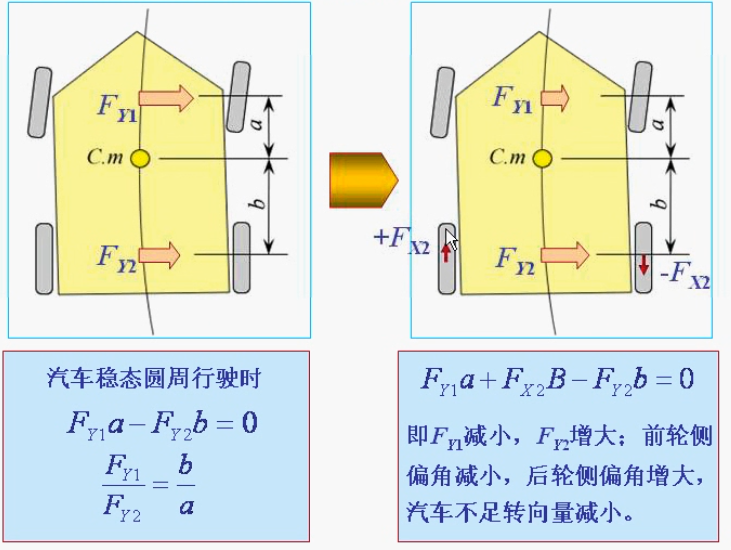
重点 内外侧车轮间切向力分配的控制
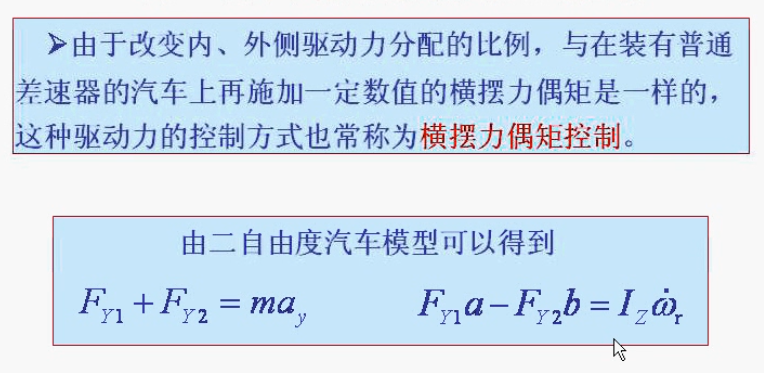
外轮的驱动力增加,是偏向于过多转向的,内轮的驱动力增加,是偏向于不足转向的
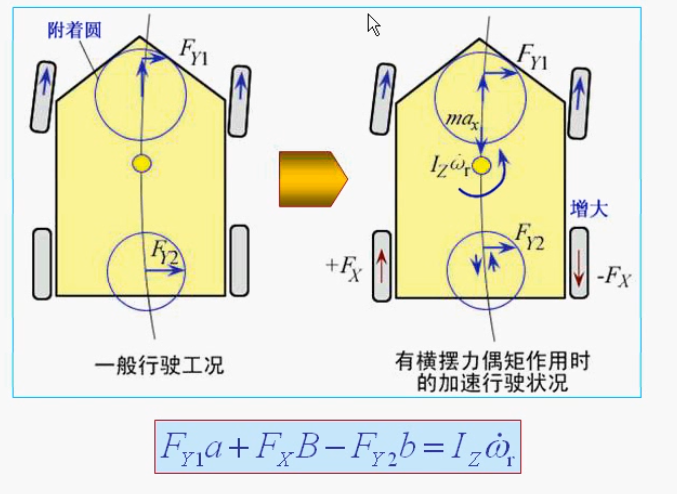
增大后轴外侧车轮的驱动力或者是增大内侧车轮的制动力都能起到在转弯时抑制不足转向的问题
车队为了能够更快过弯,采用的方案应该是前一种
结论:横摆力偶矩及制动力的控制效果
1)为了保持汽车的稳定性,当后轴要侧滑发生激转时,应对汽车施加外侧俄横摆力偶矩;
2)当前轴要侧滑而使汽车驶离弯道时,应对汽车施加适当大小的向内侧的横摆力偶矩,使后轮的侧偏角达到最大侧偏力的角度;
3)同时要对汽车施加纵向减速力,但是这个的影响很小;
横摆力偶矩的来源:
调节整车每个车轮的制动力或者驱动力;