Air cerefrence1
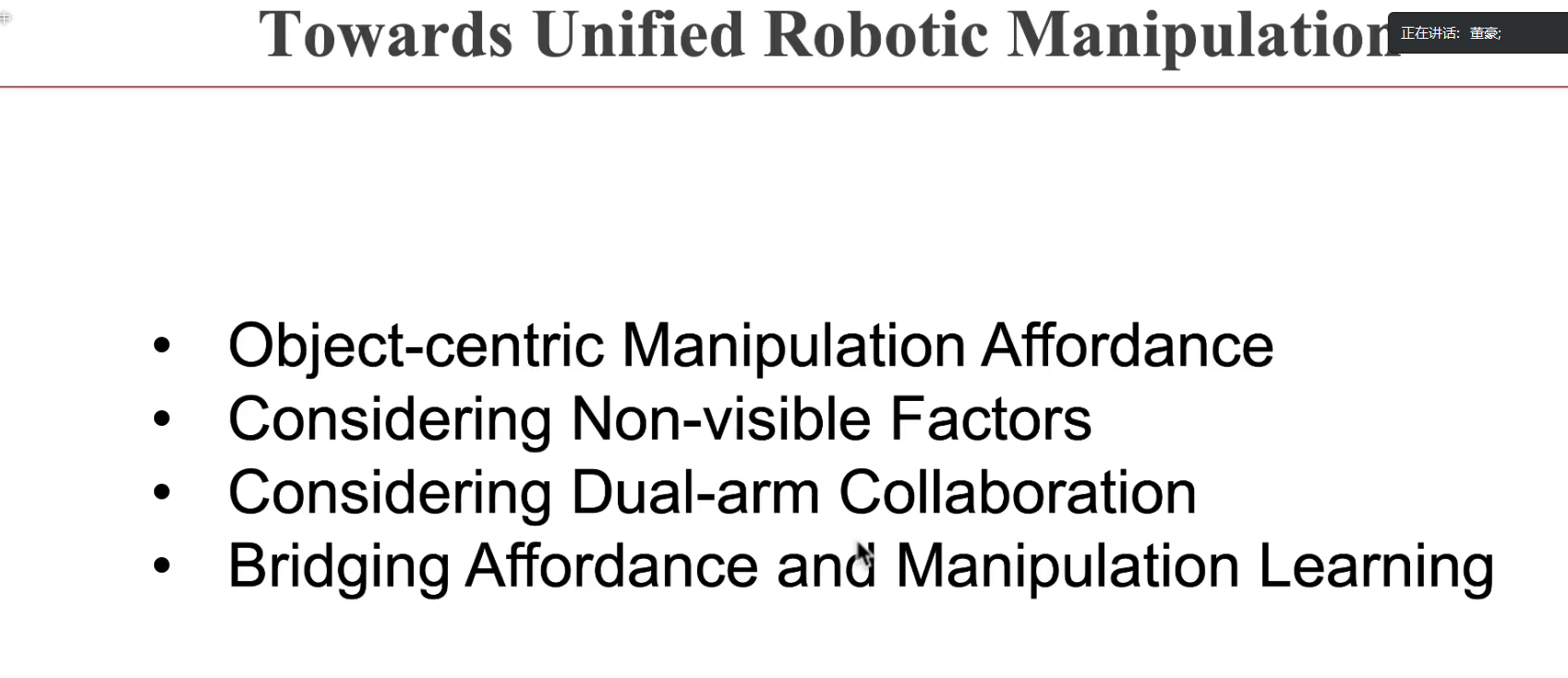
Towards unified robotics manipulation via object-centric policy
Hao Dong @Peking University
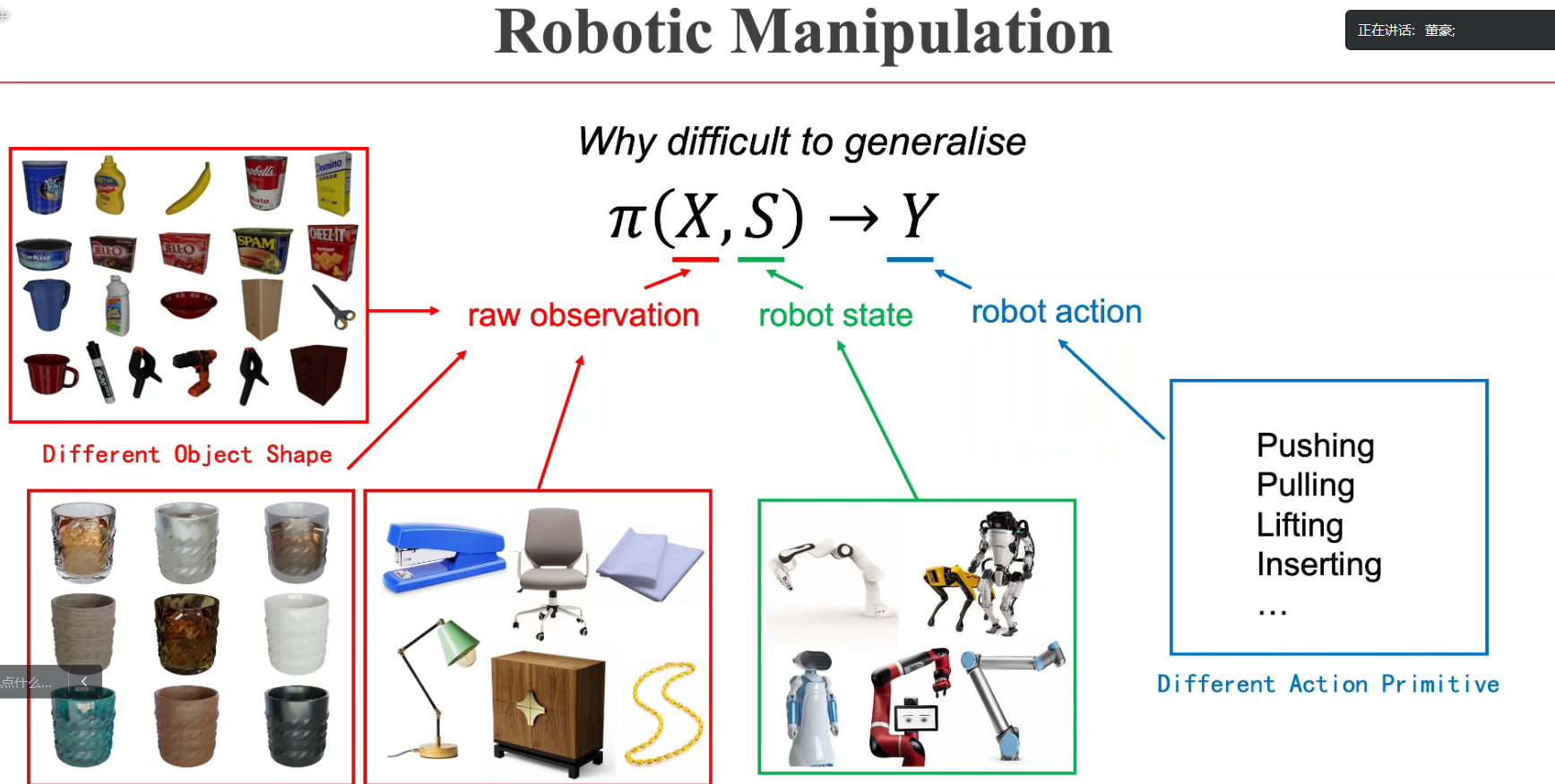
难点
- 机器人遇到的环境很复杂,很难用简单的组合策略进行控制
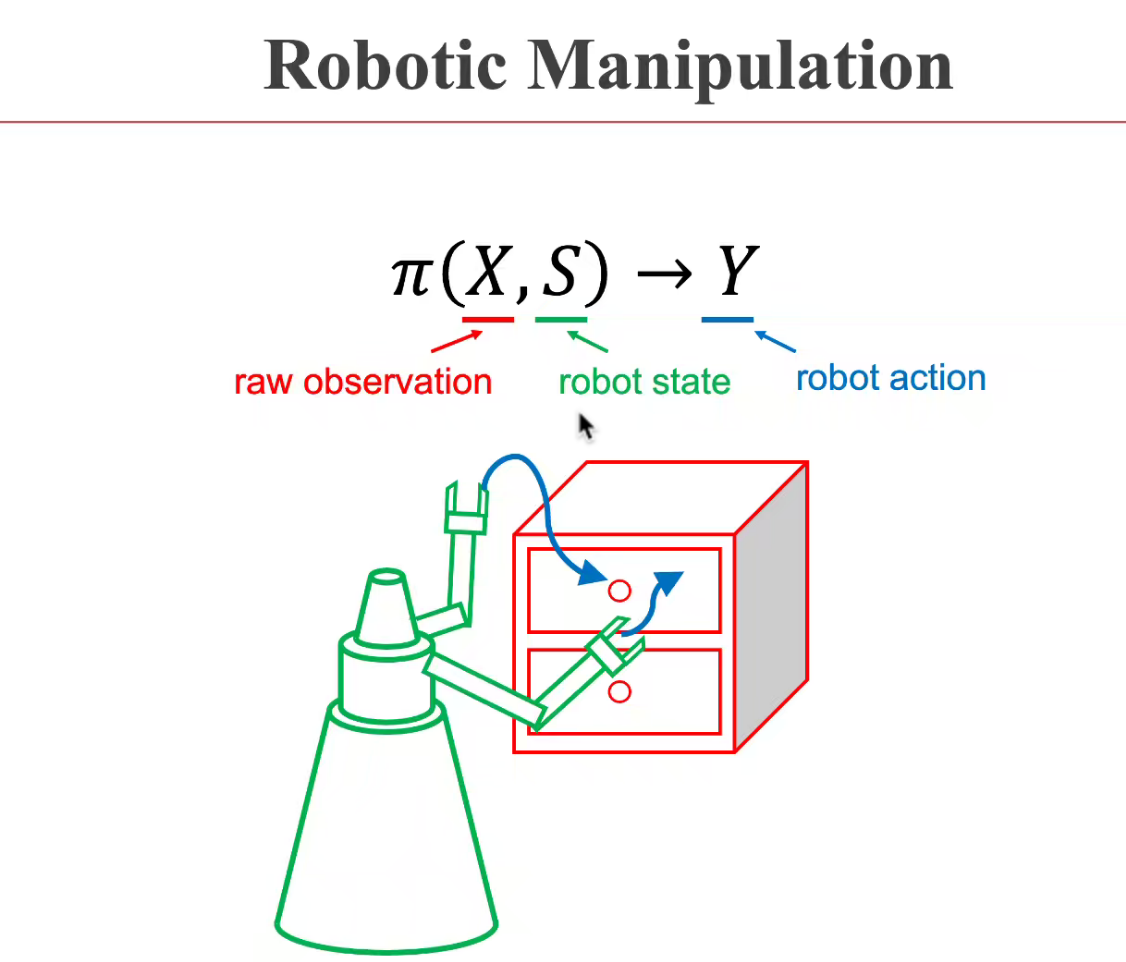
object-centric policy
人交互的时候存在与物体之间的先验知识
- 哪个部分可以交互
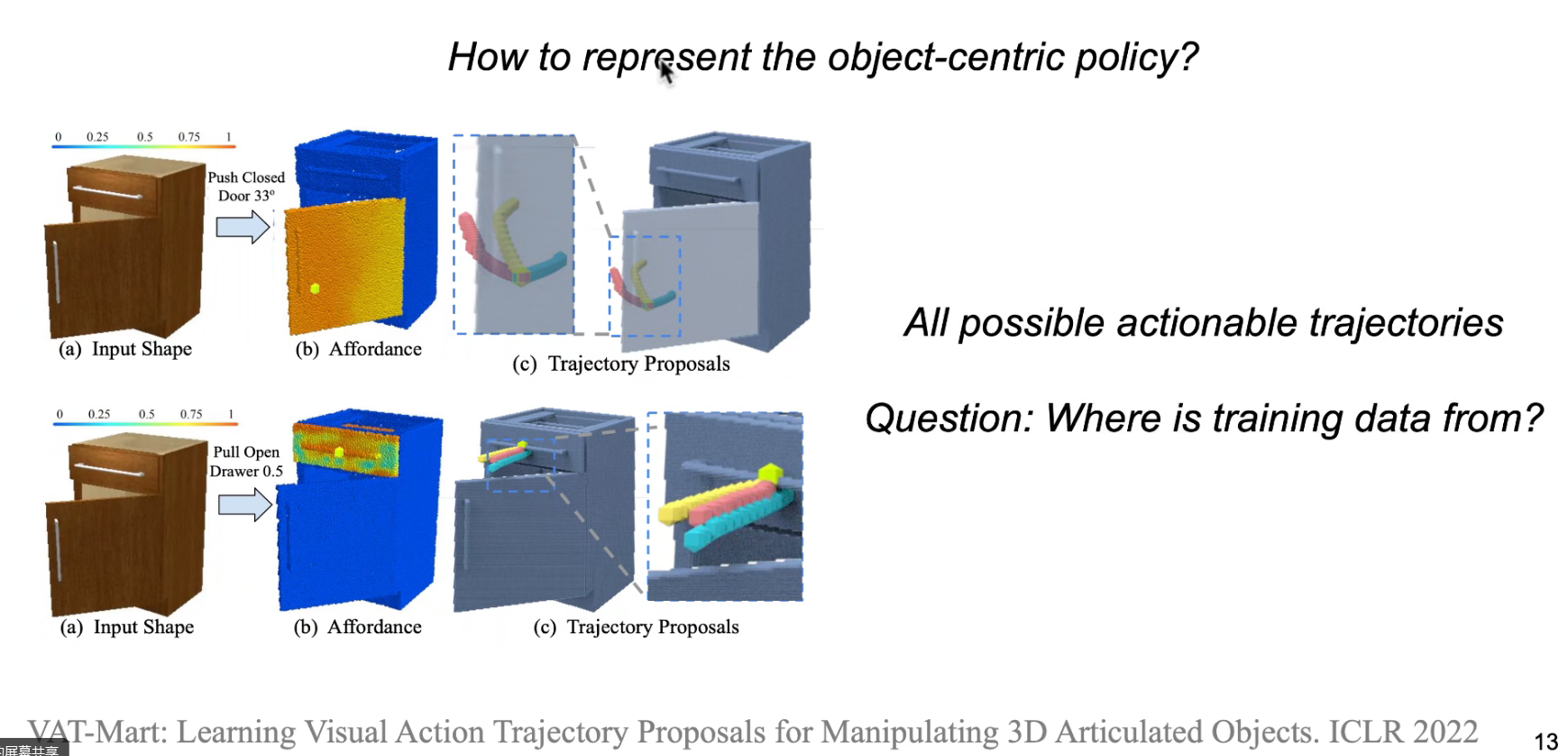
- 往哪里运动可以实现功能
项目解决的问题
给机器人一个物体,可以预测出这个物体会产生怎么样的交互结果
通过强化学习的方式给出trajectory
问题:
- 有些物体需要两只手才能拿起来 dual-arm collaboration affordance
- 多arm协作的时候动作空间很大,很难学习,解决方法,将问题变为一个串形任务,比如先学习affordance1,再学习affordance2
本博客所有文章除特别声明外,均采用 CC BY-NC-SA 4.0 许可协议。转载请注明来自 Wizard!

