模糊控制理论
模糊控制笔记(前视距离的学习)
- REF: 参考了知乎的笔记:模糊控制
- Author: Wily_Elite
模糊控制系统设计流程
- 确定模糊控制器的结构
- 定义输入、输出量的模糊控制
- 建立模糊规则
- 模糊逻辑推理(有很多方式,常用的为假言推理)
- 输出模糊量清晰化
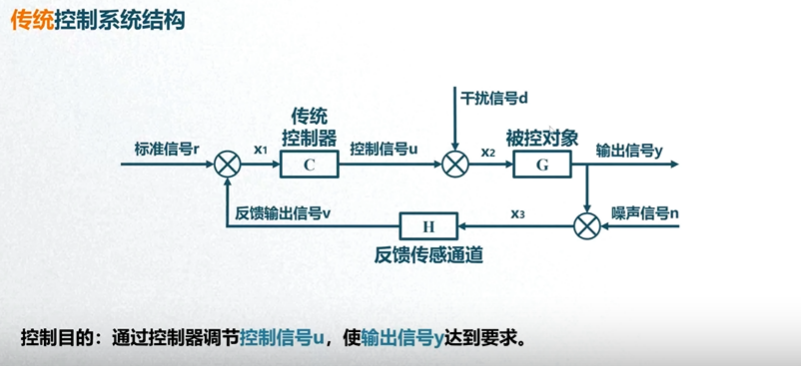
模糊控制和自控以及现控的区别
自控和现代控制都是基于模型的控制理论,
自控使用传递函数,现代控制使用状态空间表达式,
而模糊控制是基于经验的控制,或者说是基于自然语言的控制。
前视距离模糊控制的大概细节
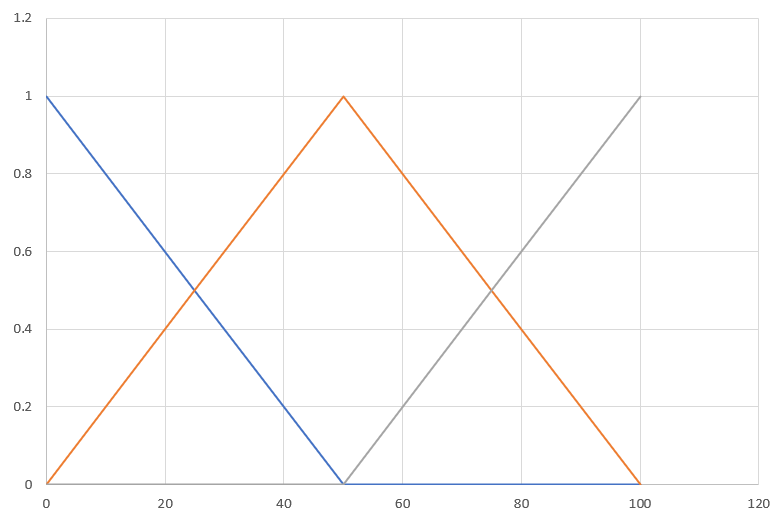
- 隶属度求解使用三角形隶属函数(以横向误差为例)
其中蓝线代表的是ULS,橙色线代表的是ULM,灰色线代表的是ULB
- 模糊规则的建立
控制对象是前世距离系数
经验是误差越大,应该将前视距离调整的越大
| LE OE | ULS | ULM | ULB |
|---|---|---|---|
| UOS | 低 | 低 | 中 |
| UOM | 低 | 中 | 高 |
| UOB | 中 | 高 | 高 |
据此我们将前视距离系数分为三个模糊集,即上表中所列出的高,中,低 ;
根据这个划分我们对控制对象做不同的处理,设置为一个钟形的隶属函数,这里略去不画
- 实际的前视距离
我们知道PP实际上是一个转向角的P控制器,其中P是车速的函数,这样的话
前视距离就和现在的速度挂钩,可以写做ld=v(t)/LDIV,LDIV称为前视距离除数,
在真车选择1.8,仿真中选择2.0
通常来说,会使用最大,最小前视距离来约束前视距离,越大的前视距离意味着轨迹的追踪越平滑,小的前视距离会使得追踪更加精确(当然也会带来控制的震荡)
本博客所有文章除特别声明外,均采用 CC BY-NC-SA 4.0 许可协议。转载请注明来自 Wizard!

